
News Team SNU(박재흥 교수팀), 세계 재난 로봇 경진대회에 참가하다.
페이지 정보
작성자 관리자 댓글 0건 조회View 101 작성일 15-08-21 04:36본문
지난 6월, 미국 캘리포니아에 있는 LA 근교의 위성도시 포모나에서는 세계 최대 규모의 재난 로봇 경진대회가 열렸다. 미국 국방부 산하 고등 연구기관인 DARPA에서 주최하는 재난 로봇 경진대회인 DARPA Robotics Challenge Finals 2015 (이하 DRC Finals 2015)가 바로 그것으로, 세계 7개국에서 25개의 팀이 참가하여 이틀 동안 각자의 독자적인 알고리즘과 하드웨어를 가지고 여러 가지 재난 미션을 수행하면서 각 팀의 실력을 뽐내었다.
DRC Finals 2015의 Conceptual Video
(유튜브: https://youtu.be/ioNjPTx216M)
본 대회에서는 한국을 대표하여 Team KAIST, Team ROBOTIS, 그리고 Team SNU가 참가였다. 특히 Team SNU는 서울대학교 융합과학기술대학원의 박재흥 교수 연구실(동적 로보틱 시스템 연구실, DYROS Lab)를 주축으로 하여 동 대학원 곽노준 교수 연구실(인공지능 및 패턴분석 연구실, MIPA Lab) 그리고 로봇 시뮬레이터 개발 회사인 심랩 (Simlab)과 함께 이루어진 팀이다.
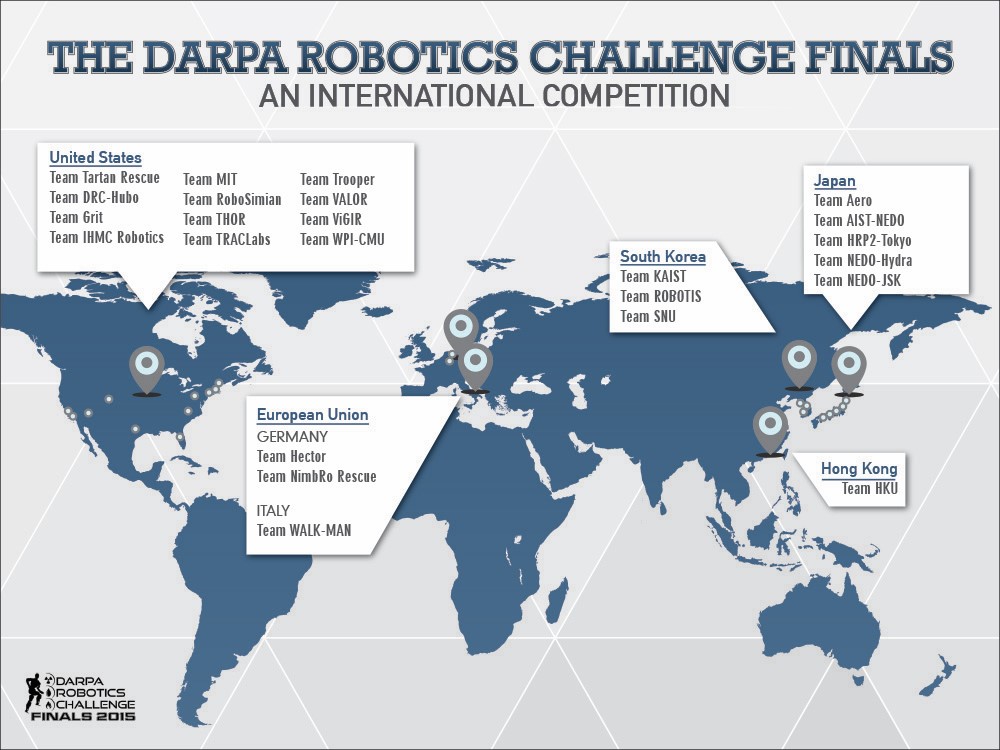
DRC Finals 2015의 Finalist2.
2. Team SNU
서울대 융합과학기술대학원, 그리고 한국을 대표하는 Team SNU는 크게 3개의 하위 연구실로 이루어져 있다. 먼저, 로봇 개발 및 제어를 담당하는 박재흥 교수 연구팀에서는 대회를 위한 전체 개발 일정을 관리하고, 로봇의 제어 및 각 미션간 동작 구성을 담당하였다. 곽노준 교수 연구팀에서는 비전이나 원거리 센서를 이용한 물체의 자동 혹은 수동 인식을 담당하였으며, 마지막으로 심랩에서는 로봇과 사용자간의 통신 및 인터페이스 개발을 담당하였다.
Team SNU는 Team KAIST나 Team ROBOTIS와는 다르게, 직접 개발한 하드웨어가 아닌 휴머노이드 로봇 제작회사인 로보티즈에서 개발한 공급형 플랫폼인 ‘똘망’을 사용하였다.
Team SNU의 소개 영상
(유튜브: https://youtu.be/GRbk-Uv_s_o)
?3. Lab Tests
본 대회를 준비하는 대부분의 팀들은 Team KAIST나 Team ROBOTIS처럼 이전 대회에 참가를 하였거나, 자기가 개발한 하드웨어를 사용하는 경우가 많다. 하지만 Team SNU는 익숙하지 않은 하드웨어를 가지고 처음 출전하는 대회를 준비하는 것에 많은 어려움이 있었다. 또한, Team SNU가 똘망을 인수한 시기는 2014년 12월 말. 따라서, 6개월 동안 단 한 대의 로봇으로 각 미션을 테스트하기에는 시간이 부족하여, 연구원들이 번갈아가며 밤을 새며 연구를 진행하였다.
이러한 어려움 속에서, 대회를 성공적으로 마치기 위해 서울대학교 융합과학기술대학원과 차세대융합기술연구원의 지원을 얻어 자동차연구센터 2층에 실제 경연장과 유사한 세트를 구축해두고 미션 테스트를 진행하였다.
3.1 Driving Mission
Driving Mission은 자동차에 탄 로봇이 자동차를 조종하여 장애물을 피해 목적지까지 운전하는 것을 목표로 한다. Team SNU에서는 원격지에 떨어진 조종자가 로봇의 상태 및 장애물의 거리를 파악하기 위해, 로봇의 카메라를 하늘위에서 바라보는 듯한 시야를 제공하는 투영알고리즘을 구현하였다.
[동영상 ] 조작자가 보는 Driving Mode의 인터페이스
(? https://youtu.be/Z_X1akUrcZw?)
3.2 Egress Mission
Egress Mission은 운전을 끝마친 로봇이 차에서 스스로 내려오는 미션을 말한다. 로봇의 크기가 다른 로봇들보다 상대적으로 작은 똘망에게 Egress Mission은 가장 도전적인 미션이었다. Team SNU은 별도의 센서값없이 로봇이 자동차에서 뛰어내리는 듯한 동작을 미리 구성하여 이 미션을 수행하였다.
[동영상 ] Egress Test
(https://youtu.be/K7mIsJ68DoU)
3.3 Door & Valve Mission
Door와 Valve Mission은 각각 로봇이 스스로 문을 열고 문을 통과하는 것과 로봇이 스스로 벨브를 잠그는 것을 수행하여야 한다. Team SNU가 구축한 자동 인식 시스템을 통하여 문고리의 위치나 벨브의 위치를 정확히 추정한 뒤, 미리 구축한 경로로 로봇을 움직여 미션을 수행하였다.
[동영상 ] Door & Valve Test
(https://youtu.be/sGygMAmyrdo )
3.5 Wall Mission
Wall Mission은 로봇이 드릴을 잡고 드릴의 스위치를 켠 뒤, 석고 보드로 이루어진 벽을 뚫어야 한다. 이 미션은 드릴을 잡고 드릴의 전원을 키는 것이 핵심으로 많은 팀들이 실제 대회에서 드릴을 켜지 못하여 많은 어려움을 겪었다. 우리는 이를 극복하기 위해 드릴을 어떤 방향에서 잡더라도 쉽게 켤 수 있도록 로봇핸드를 제작하였다. 따라서 다른 팀들과 달리 Wall Mission을 수행하는데 걸리는 시간을 크게 단축할 수 있었다.
[동영상] 제작한 핸드로 드릴을 키는 모습
( https://youtu.be/iGJuDUlzrqs)
3.6 Debris Mission
로봇이 지나가는 경로에 장애물을 세워두어 이를 극복하여 걷는 미션인 Debris Mission은 장애물의 위치나 종류 등이 고정되어 있지 않기 때문에 조작자가 로봇의 카메라나 원거리 센서를 이용하여 수동으로 움직이게 하였다.
[동영상 ] Debris Test
( https://youtu.be/EsAEBpE1PWg?)
3.7 Stairs Mission
로봇이 계단을 극복하여 올라가는 Stairs 미션에서 우리는 다른 팀들과 다른 전략을 세웠다. 로봇의 낮은 모터 출력으로 인하여 두 다리만으로 계단을 올라가지 못하였기 때문에, 어린아이가 높은 계단을 올라가듯이 로봇의 팔로 계단 지지대를 잡고 올라가는 전략을 세웠다.
[동영상 ] Stairs Test (5배속)
( https://youtu.be/QpRXsHKQf_s )
4. Team SNU의 현지 준비 과정
대회가 열리는 2015년 6월 5~6일을 위하여, Team SNU는 6월 2일 현지에 도착하였다. 주최측에서 제공한 Team Garage에서 비행기에 분해하여 실어온 우리의 로봇 똘망을 다시 조립하고 대회장의 상태에 맞게끔 알고리즘을 정리하였다.
Team Garage에서의 모습
한 가지 예상하지 못하였던 점은 평지 지형이라고 생각하였던 대회장이 사실은 약 3~4도정도의 기울기를 가진 지형이었다는 점이었다. Team SNU는 이를 극복하기 위하여 합판을 이용한 기울어진 경사에서의 보행 테스트 및 각 미션 테스트를 진행하였다. 이러한 노력으로 인하여 두 번에 걸친 실제 대회에서 대부분의 2족 로봇들이 대회 도중 넘어진 반면, Team SNU의 똘망은 한번도 넘어지지 않고 미션을 수행할 수 있었다.
[동영상 ] Team Garage에서의 모습
(유튜브 주소:https://youtu.be/2E5FlpwQDL8)
5. DRC Finals 2015에서의 Team SNU
대회는 양일 간 팀별로 한번씩 시합을 진행한다. Team SNU는 1일차에서 Driving Mission, Door Mission, 그리고 Valve Mission을 수행하여 3점을 획득하였으며, 2일차에서는 1일차에서 수행한 미션 뿐만 아니라 대회에서 가장 어렵다고 평가받았던 Drill Mission을 수행하여 4점을 받아 25개의 팀 중 중위권인 12위에 랭크되었다. 앞서 언급하였듯이 국내에서 예상하지 못하였던 지면 경사로 인하여 로봇의 안정성을 위해 보행 속도를 최대한 늦추었으며 국내에서 가장 힘써서 연습을 한 Egress Mission을 시도하지 못하였기 때문에, 더 높은 점수를 획득하지 못하였다.
[동영상 ] Team SNU at DRC Finals 2015
(유튜브 주소: https://youtu.be/aWpyfKkbzf0)

{kind=link}
{kind=link}
최종 순위
하지만, Team SNU가 수행한 4개의 미션, Driving Mission, Door Mission, Valve Mission, 그리고 Drill Mission의 수행 속도와 성능을 다른 상위 팀과 견주어 본다면, 예기치못한 동작 오류가 있었던 Door Mission을 제외하고는 각 미션 수행 상위 5개팀 안에 Team SNU가 속함을 알 수 있다. 특히, Wall Mission의 경우 25개의 팀 중 7개의 팀만 성공한 어려운 미션이었음에도 불구하고, 장내 아나운서가 “Team SNU가 모든 팀들과 비교하였을 때 벽을 뚫기 위한 최고의 원을 그렸다”라고 할 만큼 월등한 퍼포먼스를 선보였다.
{kind=link}
Driving Mission을 성공한 팀들의 수행 시간 비교
{kind=link}
Door Mission을 성공한 팀들의 수행 시간 비교
{kind=link}
Valve Mission을 성공한 팀들의 수행 시간 비교
{kind=link}
Wall Mission을 성공한 팀들의 수행 시간 비교
[관련 기사]
1. 로봇신문, “DRC 막바지 준비로 바쁜 ‘서울대팀’”
http://www.irobotnews.com/news/articleView.html?idxno=4898
2. 로봇신문, “아쉽지만 후회는 없다”
http://www.irobotnews.com/news/articleView.html?idxno=5307
[관련 방송]
1. EBS, EBS 특별기획 로봇 새로운 미래
http://home.ebs.co.kr/sdocu/board/1/502952/view/10005897420?c.page=1&hmpMnuId=100&searchKeywordValue=0&bbsId=502952&fileClsCd=ANY&searchKeyword=&searchCondition=&searchConditionValue=0
2. YTN Science, ICT 매거진, “인간을 지킨다! 로봇”
http://science.ytn.co.kr/program/program_view.php?s_mcd=1139&s_hcd=&key=201507291709529937&page=1[/fusion_text]
댓글목록
등록된 댓글이 없습니다.